概要
BVE本体のバージョンが5.4から5.5にアップグレードされた際に、モータ音再現の仕様に変更が加えられました。このため、バージョン5.4以前とバージョン5.5以後とではモータ音の鳴り方が異なっています。この仕様変更と、バージョン5.5で導入された新パラメータSlipVelocityCoefficientについて解説します。
バージョン5.4までにおけるモータ音再現の仕様
VVVF制御車のほとんどを占める誘導モータは、モータ回転数(周波数)に「すべり」を加減した周波数で回転磁界を発生させることによって加減速トルクを掛けるため、同期モードにおける磁歪音のピッチが速度と比例していません。この仕組みの再現を目的としたためか、BVEのバージョン5.4までにおいて、モータ音のピッチ設定テーブルの速度を現在の電流に応じてずらす仕様が導入されていました。この仕様の詳細については、バージョン5.5で代替として導入されたSlipVelocityCoefficientパラメータと関係が深いため、まとめて後述します。
以下のグラフは、モータ音の各成分のピッチ変化を抽象化して示したものです。
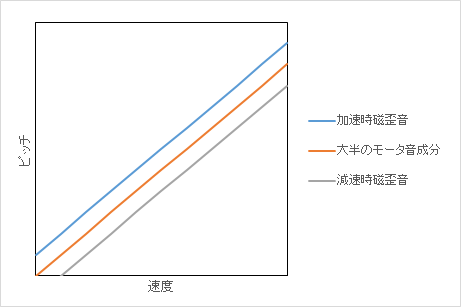
なお、モータ音の大半の成分のピッチは速度と比例の関係にあるため、VVVF+誘導モータ車では中低速時の同期モードにおいて、加速時と減速時とでモータ音の響きが異なります。誘導モータ車のモータ音ををリアルに再現したい場合、加速時と減速時とで別のモータ音サンプリング音源を用意する必要があります。
SlipVelocityCoefficientについて
バージョン5.5では車両パラメータファイルに新パラメータ「SlipVelocityCoefficient」が追加されました。これは、バージョン5.4まで自動で行っていた誘導モータ搭載車のモータ音テーブル補正を、ユーザー側が行えるようにしたものです。デフォルト値は0(補正無し)です。
SlipVelocityCoefficientの数値は、現在の電流の絶対値から無負荷電流値を差し引いた値に掛けてモータ音設定テーブルの補正用の値を得るために使用します。加速時はピッチ・ボリュームテーブルの速度値にこの補正値を減算し、減速時は逆に加算します。例えば、SlipVelocityCoefficientの値が0.0025[km/h/A]で現在の電流が500[A]、無負荷電流が100[A]の場合、補正値は(500 - 100) * 0.0025 = 1[km/h]となります。ジャーク制御等により電流が変化するときにも補正値は追随して変化します。
SlipVelocityCoefficientパラメータを使用する場合、モータ音データを組み上げる時は0にしておき、最後に隠し味程度に加味するのが適切かと思われます。交流モータ車特有の事象を再現するためのパラメータのため、直流モータ車ではSlipVelocityCoefficientを設定する必要はありません。
なお、バージョン5.4までの自動補正がピッチ設定のみに対して行われていたのに対し、SlipVelocityCoefficientによる補正はピッチとボリュームの両方に掛かるため、SlipVelocityCoefficientの設定ではバージョン5.4と5.5の間におけるモータ音の鳴り方の相違の補正はできません。
バージョン5.4までの自動補正において使用されていたSlipVelocityCoefficientに相当する補正係数は0.005[km/h/A]となっています。コンバータによって生成される車両データの場合、空車時においては起動電流が100Aで無負荷電流が20Aのため、ピッチ設定の速度補正量は(100 - 20) * 0.005 = 0.4となります。この程度であれば聞き比べて初めて違いが分かることも多いですが、実車通りの数百Aの電流値を設定した場合、その違いは無視できないものとなります。逆に、電流値を小さめに設定しておくことで、バージョン5.4以前と5.5以降の間のモータ音の鳴り方の違いを抑えることができます。